Close




Download
3. TECHNICAL NOTES
3.1 Coupling
The technopolymer transmission elements can be paired with both technopolymer and metal gears. In the case of coupling with metal gears, the higher thermal conductivity of the metal allows a faster dissipation of the heat accumulated during the operation. In the case of metal-technopolymer coupling, the metal pinion and the technopolymer gear are the best option, as the wear of the technopolymer toothed gear is lower.
3.2 Operating distance
The operating distance (I), is the distance between the centers of the shafts on which the toothed gears are mounted, is given by the following formula:
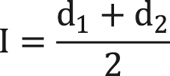
where d1 and d2 are the pitch diameters of the gears.
In order to get an optimal meshing between two gears, it is necessary to have a positive backlash between the centers of the two shafts: the effective distance (f) between the two centers of the shafts on which the gears are mounted is slightly longer than the operating distance (l).
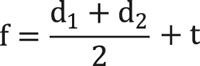
The meshing without backlash or with a negative backlash would increase the friction between the teeth, thus increasing the operating temperature and diminishing the resistance to wear and stress. To avoid these problems, for ELESA gears, the following tolerances (t) are recommended:
- (+0.03 +0.1) for modules 0.5 – 1.0 – 1.5
- (+0.08 +0.3) for bigger modules
3.3 Lubrication
One of the main advantages of the reinforced technopolymer gears is the chance to use them without lubricating oil, thanks to the intrinsic nature of the polymers. Where possible, the use of lubrication is however recommended, to reduce friction and wear, thus increasing the service life of the product. For Elesa gears it is recommended to use lubricating grease based on lithium soaps and synthetic oil.
On equal use conditions, revolutions per minute and torque, the use of lubricants considerably increases the service life of the gears if compared with their operating in dry conditions.
3.4 Machining
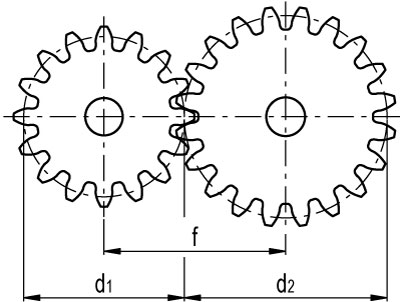
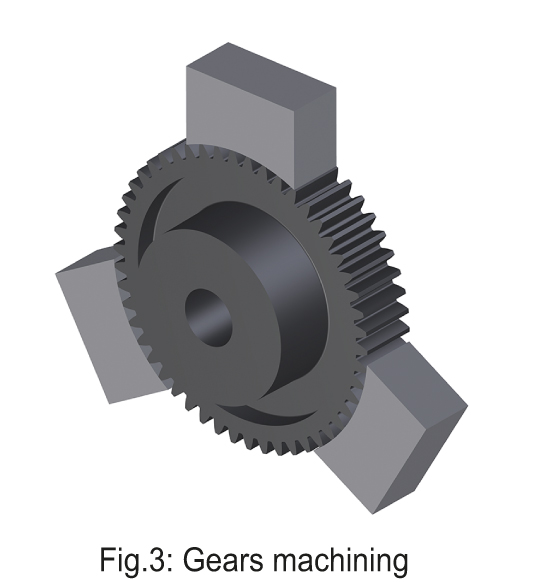
For a correct operation on the technopolymer spur gears, the mechanical machining has to be made by positioning the clamps on the teeth, as shown in the Fig.3. The diameter of the clamps must be turned by referring to the tip of the gear.
3.5 Materials
ELESA spur gears and racks are made of glass-fibre reinforced polyamide based technopolymer. The main mechanical characteristics of this type of material are:
- high resistance to torsion and tensile strength (about three times higher than acetal resin);
- good resistance to high temperatures;
- a low friction coefficient, especially if compared to steel. Accordingly, the technopolymer gears can be used even when lubrication is not allowed;
- low specific weight, a greater lightness of technopolymer gears over metal gears;
- high dimensional stability, high resistance to wear and chemical agents.
-
Generals
-
1. Plastic materials
- 1.1 Mechanical strength
- 1.2 Thermal resistance
- 1.3 Strength and surface hardness
- 1.4 Resistance to chemical agents
- 1.5 Resistance to atmospheric agents and uv rays
- 1.6 Flame resistance
- 1.7 Electrical properties
- 1.8 Surface finish and cleanability
- 1.9 Compliance with international standards
- 1.10 Competence of Elesa+Ganter technical department
- 2. Metal materials
- 3. Other materials
- 4. Machining tolerances
- 5. Fixed handles
- 6. Assembly measures
- 7. Special executions
- 8. Colours
- 9. Test values
-
10. Technical tables
- 10.1 Conversion tables
- 10.2 DIN 79 Square holes and shafts
- 10.3 DIN 6885 Keyways
- 10.4 GN 110 and GN 110.1 Transversal holes
- 10.5 DIN 13 ISO Metric threads
- 10.6 DIN 228 Cylindrical GAS-BSP threads
- 10.7 DIN EN ISO 898-1 | DIN EN 20898-2 Strenght values
- 10.8 DIN ISO 286 ISO-Fundamental tolerances
- 10.9 IP Protection Classification
- 10.10.1 PFB | PRB Thread locking with jamming action Polyamide patch coating/ Polyamide complete coating
- 10.10.2 MVK Thread locking gluing Micro encapsulation precote 80 (red)
- 10.11 Stainless Steel characteristics
- 10.12 Surface treatments
- 10.13 Carbon steel, zinc alloys, aluminium, brass characteristics
- 10.14.1 Duroplast, elastomer, technopolymer and rubber characteristics
- 10.14.2 Duroplast, elastomer, technopolymer and rubber characteristics
- 10.14.3 Duroplast, elastomer, technopolymer and rubber characteristics
- 10.15 Load ratings U-Handles
- 10.16 Load ratings metal hinges
- 10.17 Strength of indexing plungers
- 10.18 Assembly sets GN 965 and GN 968
- 11. Vibration-damping elements
-
1. Plastic materials
- Hygienic design
- Operating Elements
- Clamping knobs
- Control elements
- Rotary controls
- Indexing elements
- Joints
- Transmission elements
- Levelling elements
- Hinges
- Latches
- Toggle, power and hook clamps
- Accessories for hydraulic systems
- Tube clamp connectors
- Castors and wheels
- Magnets
- Conveyor components
- Linear slides
- Vibration mounts
- Vacuum components
- Elastomer springs